

DK4-BZ-002
Micro Switch 3Pin SPDT Mini Limit Switch 10A 250VAC Roller Arc lever Snap Action Push Micro switches
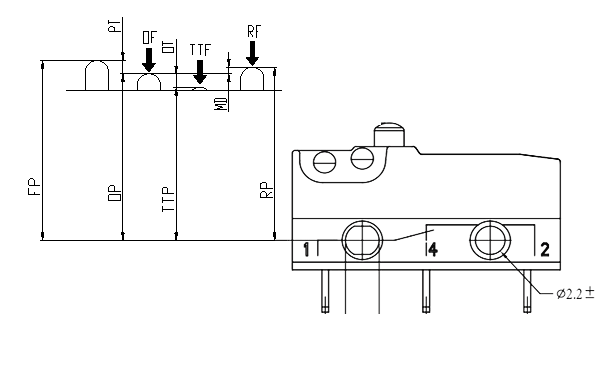
| (ການກໍານົດລັກສະນະຂອງການດໍາເນີນງານ) | (ຕົວກໍານົດການດໍາເນີນການ) | (ຕົວຫຍໍ້) | (ຫົວໜ່ວຍ) |
|
| (ຟຣີຕຳແໜ່ງ) | FP | mm |
| (ຕໍາແຫນ່ງປະຕິບັດການ) | OP | mm | |
| (ປົດຕຳແໜ່ງ) | RP | mm | |
| (ຕໍາແຫນ່ງການເດີນທາງທັງຫມົດ) | TTP | mm | |
| (ກຳລັງປະຕິບັດງານ) | OF | N | |
| (ກຳລັງປົດປ່ອຍ) | RF | N | |
| (ກຳລັງເດີນທາງທັງໝົດ) | TTF | N | |
| (ກ່ອນການເດີນທາງ) | PT | mm | |
| (ເກີນການເດີນທາງ) | OT | mm | |
| (ຄວາມແຕກຕ່າງຂອງການເຄື່ອນໄຫວ) | MD | mm |
ປ່ຽນລັກສະນະທາງວິຊາການ
| (ລາຍການ) | (ຕົວກໍານົດການດ້ານວິຊາການ) | (ມູນຄ່າ) | |
| 1 | (ການຈັດອັນດັບໄຟຟ້າ) | 10(1.5)A 250VAC | |
| 2 | (ຕິດຕໍ່ຕ້ານ) | ≤50mΩ(ຄ່າເບື້ອງຕົ້ນ) | |
| 3 | (Insulation Resistance) | ≥100MΩ(500VDC) | |
| 4 | (ແຮງດັນໄຟຟ້າ) | (ລະຫວ່າງ terminals ທີ່ບໍ່ເຊື່ອມຕໍ່) | 500V/0.5mA/60S |
| (ລະຫວ່າງ terminals ແລະກອບໂລຫະ) | 1500V/0.5mA/60S | ||
| 5 | (ຊີວິດໄຟຟ້າ) | ≥10000 ຮອບ | |
| 6 | (ຊີວິດກົນຈັກ) | ≥3000000 ຮອບ | |
| 7 | (ອຸນຫະພູມປະຕິບັດ) | -25~105℃ | |
| 8 | (ຄວາມຖີ່ຂອງການດໍາເນີນການ) | (ໄຟຟ້າ): 15ຮອບວຽນ(ກົນຈັກ): 60ຮອບວຽນ | |
| 9 | (ປ້ອງກັນການສັ່ນສະເທືອນ) | (ຄວາມຖີ່ຂອງການສັ່ນສະເທືອນ): 10 ~ 55HZ; (ຄວາມກວ້າງໃຫຍ່) : 1.5mm; (ສາມທິດທາງ): 1H | |
| 10 | (Solder ຄວາມສາມາດ): (ຫຼາຍກ່ວາ 80% ຂອງສ່ວນທີ່ immersed ຈະໄດ້ຮັບການປົກຫຸ້ມດ້ວຍ solder) | (ອຸນຫະພູມ soldering): 235 ± 5℃ (ເວລາແຊ່ນ້ໍາ): 2 ~ 3S | |
| 11 | (ຄວາມທົນທານຕໍ່ຄວາມຮ້ອນ Solder) | (Dip Soldering): 260±5℃ 5±1S (Manual Soldering): 300±5℃ 2~3S | |
| 12 | (ການອະນຸມັດຄວາມປອດໄພ) | UL, CSA, TUV, ENEC | |
| 13 | (ເງື່ອນໄຂການທົດສອບ) | (ອຸນຫະພູມສະພາບແວດລ້ອມ): 20 ± 5 ℃ (ຄວາມຊຸ່ມຊື່ນ) : 65 ± 5% RH ຄວາມກົດດັນອາກາດ: 86~106KPa | |
ການວິເຄາະການໄຫຼວຽນຂອງການດໍາເນີນງານໂດຍລວມຂອງສະຫຼັບຈຸນລະພາກ
ຂະບວນການປະຕິບັດງານໂດຍລວມຂອງສະຫຼັບໄມໂຄແມ່ນລາຍລະອຽດ:
①ຄວາມກົດດັນການດໍາເນີນງານຂອງ: ມັນຖືກເພີ່ມໃສ່ປຸ່ມຫຼືຕົວກະຕຸ້ນເພື່ອເຮັດໃຫ້ສະຫຼັບຜະລິດຜົນບັງຄັບໃຊ້ສູງສຸດທີ່ຕ້ອງການສໍາລັບການດໍາເນີນການຕໍ່ (ເຊື່ອມຕໍ່ຫຼືຕັດວົງຈອນ).
② Reverse ປະຕິບັດການ RF: ກໍາລັງຕໍາ່ສຸດທີ່ປຸ່ມຫຼື actuator ສາມາດຮັບໄດ້ໃນເວລາທີ່ສະວິດແມ່ນ reverse (ຕັດການເຊື່ອມຕໍ່ຫຼືເຊື່ອມຕໍ່ກັບວົງຈອນ).
③Contact pressure TF: ຄວາມກົດດັນຂອງຈຸດຕິດຕໍ່ static ໃນເວລາທີ່ປຸ່ມຫຼືພາກສ່ວນ actuator ຢູ່ໃນຕໍາແຫນ່ງຟຣີ, ຫຼືຄວາມກົດດັນຂອງຈຸດຕິດຕໍ່ແບບເຄື່ອນໄຫວໃນເວລາທີ່ພາກສ່ວນ actuator ປຸ່ມຢູ່ໃນຕໍາແຫນ່ງຈໍາກັດ.
④ FP ຕໍາແຫນ່ງຟຣີ: ຕໍາແຫນ່ງຈາກຈຸດສູງສຸດຂອງປຸ່ມຫຼື actuator ກັບເສັ້ນພື້ນຖານຂອງຮູ mounting ສະຫຼັບໃນເວລາທີ່ສະຫຼັບຢູ່ໃນສະພາບປົກກະຕິແລະບໍ່ຂຶ້ນກັບຜົນບັງຄັບໃຊ້ພາຍນອກ.
⑤ຕໍາແຫນ່ງປະຕິບັດການ OP: ເມື່ອປຸ່ມສະຫຼັບຫຼືອົງປະກອບ actuator ແມ່ນຢູ່ໃນການປະຕິບັດໃນທາງບວກ, ຕໍາແຫນ່ງຈາກຈຸດສູງສຸດຂອງປຸ່ມຫຼືອົງປະກອບ actuator ກັບເສັ້ນພື້ນຖານຂອງຮູ mounting ສະຫຼັບ.
⑥ Restore ຕໍາແຫນ່ງ RP: ເມື່ອປຸ່ມສະຫຼັບຫຼືອົງປະກອບ actuator ແມ່ນຢູ່ໃນການປະຕິບັດປີ້ນກັບກັນ, ຕໍາແຫນ່ງຈາກຈຸດສູງສຸດຂອງປຸ່ມຫຼືອົງປະກອບ actuator ກັບເສັ້ນພື້ນຖານຂອງຮູ mounting ສະຫຼັບ.
⑦ TTP ການເຄື່ອນໄຫວທັງຫມົດ: ຕໍາແຫນ່ງສູງສຸດທີ່ປຸ່ມສະຫຼັບຫຼືອົງປະກອບ actuator ສາມາດອະນຸຍາດໃຫ້ຍ້າຍໃນເວລາທີ່ມັນເຮັດວຽກ.
⑧ Action stroke PT: ໄລຍະສູງສຸດຈາກຕໍາແຫນ່ງທີ່ບໍ່ເສຍຄ່າຂອງປຸ່ມສະຫຼັບຫຼື actuator ກັບຕໍາແຫນ່ງປະຕິບັດໃນທາງບວກ.
⑨ Overrun ການເດີນທາງ OT: ປຸ່ມສະຫຼັບຫຼືອົງປະກອບ actuator ສືບຕໍ່ຍ້າຍລົງຈາກຕໍາແຫນ່ງປະຕິບັດໃນທາງບວກ, ແລະໄລຍະຫ່າງກັບຕໍາແຫນ່ງຈໍາກັດທີ່ບໍ່ສິ້ນສຸດຫຼືທໍາລາຍການປະຕິບັດກົນຈັກຂອງສະຫຼັບ, ປົກກະຕິແລ້ວໃຊ້ເວລາຄ່າຕໍາ່ສຸດທີ່.





