

DK4-BZ-002
Micro întrerupător 3Pin SPDT Mini întrerupător de limită 10A 250VAC Rolă Arc pârghie Acțiune rapidă Push Micro întrerupătoare
| (Caracteristicile definitorii ale funcționării) | (Parametru de funcționare) | (Abreviere) | (Unități) |
|
| (Poziție liberă) | FP | mm |
| (Poziția de funcționare) | OP | mm | |
| (Poziția de eliberare) | RP | mm | |
| (Poziția totală de călătorie) | TTP | mm | |
| (Forța de operare) | OF | N | |
| (Forța de eliberare) | RF | N | |
| (Forța totală de călătorie) | TTF | N | |
| (Înainte de călătorie) | PT | mm | |
| (Peste călătorie) | OT | mm | |
| (Diferenţial de mişcare) | MD | mm |
Caracteristicile tehnice ale comutatorului
| (ARTICOL) | (parametru tehnic) | (Valoare) | |
| 1 | (Evaluare electrică) | 10(1,5)A 250VAC | |
| 2 | (Rezistența la contact) | ≤50mΩ (valoarea inițială) | |
| 3 | (Resiztenta izolarii) | ≥100MΩ(500VDC) | |
| 4 | (Tensiune dielectrică) | (între terminale neconectate) | 500V/0,5mA/60S |
| (intre terminale si rama metalica) | 1500V/0,5mA/60S | ||
| 5 | (Viața electrică) | ≥10000 de cicluri | |
| 6 | (Durata mecanica) | ≥3000000 de cicluri | |
| 7 | (Temperatura de Operare) | -25~105℃ | |
| 8 | (Frecventa de operare) | (electrice): 15cicluri(Mecanic): 60cicluri | |
| 9 | (Probabil la vibrații) | (Frecvența vibrațiilor):10~55HZ; (Amplitudine):1,5 mm; (Trei direcții): 1H | |
| 10 | (Abilitatea de lipit): (Mai mult de 80% din piesa imersată va fi acoperită cu lipire) | (Temperatura de lipire): 235±5℃ (Timp de scufundare): 2~3S | |
| 11 | (Rezistența la căldură la lipire) | (Lipire prin scufundare):260±5℃ 5±1S(Lipire manuală):300±5℃ 2~3S | |
| 12 | (Aprobari de siguranta) | UL、CSA、TUV、ENEC | |
| 13 | (Condiții de test) | (Temperatura ambientală):20±5℃(Umiditate relativă):65±5%RH (Presiunea aerului):86~106KPa | |
Analiza fluxului general de funcționare al microcomutatorului
Procesul general de funcționare al micro-comutatorului este detaliat:
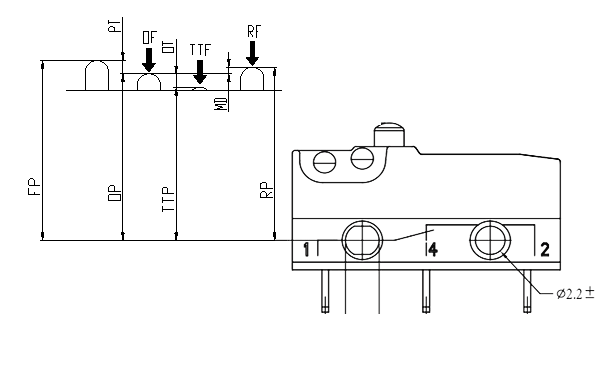
①Presiunea de operare OF: Se adaugă butonului sau actuatorului pentru ca comutatorul să producă forța maximă necesară pentru acțiunea înainte (conectarea sau deconectarea circuitului).
②Forța de operare inversă RF: Forța minimă pe care o poate suporta butonul sau actuatorul atunci când comutatorul este inversat (deconectat sau conectat la circuit).
③Presiunea de contact TF: Presiunea punctului de contact static atunci când butonul sau partea de acţionare este în poziţia liberă, sau presiunea punctului de contact dinamic când partea de acţionare a butonului este în poziţia limită.
④Poziția liberă FP: Poziția de la punctul cel mai înalt al butonului sau al actuatorului până la linia de bază a orificiului de montare a comutatorului atunci când comutatorul este în stare normală și nu este supus forței externe.
⑤Poziția de funcționare OP: Când butonul comutator sau componenta actuatorului este într-o acțiune pozitivă, poziția de la punctul cel mai înalt al butonului sau componentei actuatorului până la linia de bază a orificiului de montare a comutatorului.
⑥Restabiliți poziția RP: Când butonul comutator sau componenta actuatorului este în acțiune inversă, poziția de la punctul cel mai înalt al butonului sau componentei actuatorului până la linia de bază a orificiului de montare a comutatorului.
⑦Mișcare totală TTP: Poziția maximă pe care butonul comutator sau componenta de acţionare o poate permite să se deplaseze atunci când funcționează.
⑧ Cursa de acțiune PT: Distanța maximă de la poziția liberă a butonului de comutare sau a dispozitivului de acționare la poziția de acțiune pozitivă.
⑨ Cursă de depășire OT: Butonul comutatorului sau componenta actuatorului continuă să se miște în jos din poziția de acțiune pozitivă, iar distanța până la poziția limită care nu termină sau nu dăunează performanței mecanice a comutatorului, ia de obicei valoarea minimă.





